“Pertanian Tanaman
Hidroponik ( rain sensor,
Flame Sensor, LM35 )”
1.
Dapat
digunakan petani hidroponik untuk membantu mengontrol dan mengawasi tanaman
hidroponik
2.
Dapat
memanfatkan prinsip kerja komunikasi UART
3.
Dapat
memanfaatkan dan menggunakan sensor flame,sensor lm35, dan sensor rain
 |
 |
|

spefikasi - Working voltage: DC 3.3-5V
- Adjustable Sensitivity
- Dimensions: 32 x 17 mm
- Signal output indication
- Single channel signal output
- With the retaining bolt hole, convenient installation
- Outputs low level and the signal light when there is sound
- Output in the form of digital switching outputs (0 and 1 high and low)

- Vin : DC 5V
- Indikator power dan indikator basah
- Adjustable sensitivity via potensio
- Output : Analog dan Digital
- Nilai output tegangan saat kering = 5V. Semakin basah nilai output tegangan semakin berkurang
- Dimensi board sensor : 5,4 cm x 4 cm
- Dimensi board pengkondisi sinyal : 3 cm x 1,6 cm
- Berat : 10 gr
Pin Configuration1.VCC: 5V DC2.GND: ground3.DO: high/low output4.AO: analog output

 |
Spesifikasi :
Konfigurasi Pin : Pin 1 : Positive terminal of LED Pin 2 : Negative terminal of LED |
 |
Fitur LCD 16x2
|


Buzzer Features and Specifications

- Rated Voltage: 6V DC
- Operating Voltage: 4-8V DC
- Rated current: <30mA
- Sound Type: Continuous Beep
- Resonant Frequency: ~2300 Hz
- Small and neat sealed package
- Breadboard and Perf board friendly
A. Pulse wide modulation
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi.
Pada board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin tersebut merupakan pin yang bisa difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini, bisa dilakukan dengan perintah analogWrite();
PWM pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu bernilai 0 volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah dari 0 hingga 255, atau 50% dari 255), maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 * 255 atau 64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik.

Siklus Sinyal PWM pada Arduino
PWM (Pulse Width Modulation) adalah salah satu teknik modulasi dengan mengubah lebar pulsa (duty cylce) dengan nilai amplitudo dan frekuensi yang tetap. Satu siklus pulsa merupakan kondisi high kemudian berada di zona transisi ke kondisi low. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi.
Pada board Arduino Uno, pin yang bisa dimanfaatkan untuk PWM adalah pin yang diberi tanda tilde (~), yaitu pin 3, 5, 6, 9, 10, dan pin 11. Pin-pin tersebut merupakan pin yang bisa difungsikan untuk input analog atau output analog. Oleh sebab itu, jika akan menggunakan PWM pada pin ini, bisa dilakukan dengan perintah analogWrite();
PWM pada arduino bekerja pada frekuensi 500Hz, artinya 500 siklus/ketukan dalam satu detik. Untuk setiap siklus, kita bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu bernilai 0 volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita anggap setengah dari 0 hingga 255, atau 50% dari 255), maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 * 255 atau 64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik.
Siklus Sinyal PWM pada Arduino
B. Analog to Digital Converter
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt.
Pada Arduino, menggunakan pin analog input yang diawali dengan kode A( A0- A5 pada Arduino Uno). Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin);
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt.
Pada Arduino, menggunakan pin analog input yang diawali dengan kode A( A0- A5 pada Arduino Uno). Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin);
C. Komunikasi
Universal Asynchronous Receiver Transmitter (UART)
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
Cara Kerja Komunikasi UART
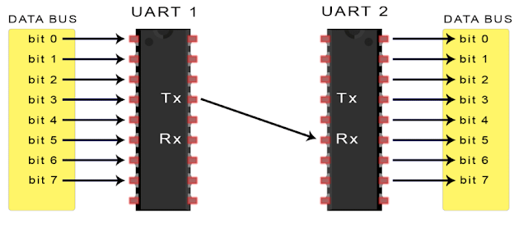
Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima.
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
Cara Kerja Komunikasi UART
Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima.
D. Sensor
1. LM 35
Sensor suhu IC LM 35 merupkan chip IC produksi Natioanal Semiconductor yang berfungsi untuk mengetahui temperature suatu objek atau ruangan dalam bentuk besaran elektrik, atau dapat juga di definisikan sebagai komponen elektronika yang berfungsi untuk mengubah perubahan temperature yang diterima dalam perubahan besaran elektrik. Sensor suhu IC LM35 dapat mengubah perubahan temperature menjadi perubahan tegangan pada bagian outputnya. Sensor suhu IC LM35 membutuhkan sumber tegangan DC +5 volt dan konsumsi arus DC sebesar 60 µA dalam beroperasi. Bentuk fisik sensor suhu LM 35 merupakan chip IC dengan kemasan yang berfariasi, pada umumnya kemasan sensor suhu LM35 adalah kemasan TO-92 seperti terlihat pada gambar dibawah.

Dari gambar diatas dapat diketahui bahwa sensor suhu IC LM35 pada dasarnya memiliki 3 pin yang berfungsi sebagai sumber supply tegangan DC +5 volt, sebagai pin output hasil penginderaan dalam bentuk perubahan tegangan DC pada Vout dan pin untuk Ground.
Karakteristik Sensor suhu IC LM35 adalah :
- Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
- Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC.
- Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
- Bekerja pada tegangan 4 sampai 30 volt.
- Memiliki arus rendah yaitu kurang dari 60 µA.
- Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
- Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
- Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
- Tegangan output sensor suhu IC LM35 dapat diformulasikan sebagai berikut :Vout LM35 = Temperature º x 10 mV
Sensor suhu IC LM 35 merupkan chip IC produksi Natioanal Semiconductor yang berfungsi untuk mengetahui temperature suatu objek atau ruangan dalam bentuk besaran elektrik, atau dapat juga di definisikan sebagai komponen elektronika yang berfungsi untuk mengubah perubahan temperature yang diterima dalam perubahan besaran elektrik. Sensor suhu IC LM35 dapat mengubah perubahan temperature menjadi perubahan tegangan pada bagian outputnya. Sensor suhu IC LM35 membutuhkan sumber tegangan DC +5 volt dan konsumsi arus DC sebesar 60 µA dalam beroperasi. Bentuk fisik sensor suhu LM 35 merupakan chip IC dengan kemasan yang berfariasi, pada umumnya kemasan sensor suhu LM35 adalah kemasan TO-92 seperti terlihat pada gambar dibawah.
Dari gambar diatas dapat diketahui bahwa sensor suhu IC LM35 pada dasarnya memiliki 3 pin yang berfungsi sebagai sumber supply tegangan DC +5 volt, sebagai pin output hasil penginderaan dalam bentuk perubahan tegangan DC pada Vout dan pin untuk Ground.
Karakteristik Sensor suhu IC LM35 adalah :
- Memiliki sensitivitas suhu, dengan faktor skala linier antara tegangan dan suhu 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
- Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada suhu 25 ºC.
- Memiliki jangkauan maksimal operasi suhu antara -55 ºC sampai +150 ºC.
- Bekerja pada tegangan 4 sampai 30 volt.
- Memiliki arus rendah yaitu kurang dari 60 µA.
- Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
- Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA.
- Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
- Tegangan output sensor suhu IC LM35 dapat diformulasikan sebagai berikut :Vout LM35 = Temperature º x 10 mV
2. sensor flame

Flame detector merupakan salah satu alat instrumen berupa sensor yang dapat mendeteksi nilai instensitas dan frekuensi api dalam suatu proses pembakaran, dalam hal ini pembakaran dalam boiler pada pembangkit listrik tenaga uap. Flame detector dapat mendeteksi kedua hal tersebut dikarenakan oleh komponen-komponen pendukung dari flame detector tersebut. Cara kerja flame detector mampu bekerja dengan baik untuk menangkap nyala api untuk mencegah kebakaran.
Prinsip Flame Detektor tersebut menggunakan metode optik yang bekerja seperti UV (ultraviolet) dan IR (infrared), pencitraan visual api, serta spektroskopi yang berfungsi untuk mengidentifikasi percikan api atau flame. Reaksi intens bahan yang memicu kebakaran dapat ditandai dari UV, terlihatnya emisi karbondioksida, dan radiasi dari infrared. Flame Detector juga mampu membedakan antara False Alarm atau peringatan palsu dengan api kebakaran sungguhan melalui komponen sistem yang dirancang dengan fungsi mendeteksi adanya penyerapan cahaya yang terjadi pada gelombang tertentu.

|
Flame detector merupakan salah satu alat instrumen berupa sensor yang dapat mendeteksi nilai instensitas dan frekuensi api dalam suatu proses pembakaran, dalam hal ini pembakaran dalam boiler pada pembangkit listrik tenaga uap. Flame detector dapat mendeteksi kedua hal tersebut dikarenakan oleh komponen-komponen pendukung dari flame detector tersebut. Cara kerja flame detector mampu bekerja dengan baik untuk menangkap nyala api untuk mencegah kebakaran. Prinsip Flame Detektor tersebut menggunakan metode optik yang bekerja seperti UV (ultraviolet) dan IR (infrared), pencitraan visual api, serta spektroskopi yang berfungsi untuk mengidentifikasi percikan api atau flame. Reaksi intens bahan yang memicu kebakaran dapat ditandai dari UV, terlihatnya emisi karbondioksida, dan radiasi dari infrared. Flame Detector juga mampu membedakan antara False Alarm atau peringatan palsu dengan api kebakaran sungguhan melalui komponen sistem yang dirancang dengan fungsi mendeteksi adanya penyerapan cahaya yang terjadi pada gelombang tertentu. |
3. Sensor Rain
Rain sensor merupakan sensor yang berfungsi untuk mendeteksi hujan turun atau tidak. Intinya sensor ini jika terkena air pada papan sensornya maka resistansinya akan berubah, semakin banyak semakin kecil dan sebaliknya. Pada sensor ini, terdapat integrated circuit atau IC (komponen dasar yang terdiri dari resistor, transistor, dan lain-lain) komparator yang berfungsi memberikan sinyal berupa logika ‘on’ dan ‘off’.T

grafik rain sensor
|
grafik rain sensor
E. Komponen
1. LED (Light Emiting Diode)

LED adalah suaatu semikonduktor yang memancarkan cahaya, LED mempunyai kecenderungan polarisasi. LED mempunyai kutub positif dan negatif (p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus terbalik, hanya akan ada sedikit arus yang melewati LED. Ini menyebabkan LED tidak akan mengeluarkan emisi cahaya.
2. Liquid Crystal Display (LCD)
Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar. Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter).

Gambar Penampang komponen penyusun LCD
Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.

Kaki-kaki yang terdapat pada LCD
3. Arduino

Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalahArduinoUnoyang menggunakan chip AVR ATmega 328P. Dalam memprogram.Arduino, kita bisa mengunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.
Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :Arduino Uno
Bagian-bagian arduino uno:
- Power USB Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
- Power jack Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
- Crystal Oscillator Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
- Reset Digunakan untuk mengulang program Arduino dari awal atau Reset.
- Digital Pins I / O Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
- Analog Pins : Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
- LED Power Indicator: Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
- Bagian - bagian pendukung:
- RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
- ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
Block Diagram Mikrokontroler ATMega 328P pada Arduino UNO
Adapun block diagram mikrokontroler ATMega 328P dapat dilihat pada gambar berikut:

Block diagram dapat digunakan untuk memudahkan / memahami bagaimana kinerja dari mikrokontroler ATMega 328P.
Pin-pin ATMega 328P:
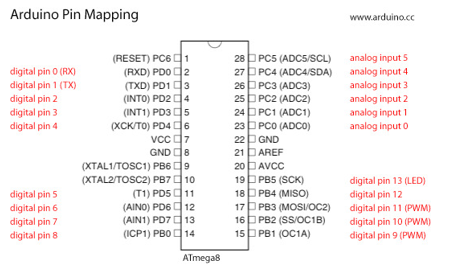
Rangkaian Mikrokontroler ATMega 328P pada Arduino UNO

1. LED (Light Emiting Diode)
|
| LED adalah suaatu semikonduktor yang memancarkan cahaya, LED mempunyai kecenderungan polarisasi. LED mempunyai kutub positif dan negatif (p-n) dan hanya akan menyala bila diberikan arus maju. Ini dikarenakan LED terbuat dari bahan semikonduktor yang hanya akan mengizinkan arus listrik mengalir ke satu arah dan tidak ke arah sebaliknya. Bila LED diberikan arus terbalik, hanya akan ada sedikit arus yang melewati LED. Ini menyebabkan LED tidak akan mengeluarkan emisi cahaya. |
2. Liquid Crystal Display (LCD)
Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar. Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter).
Gambar Penampang komponen penyusun LCD
Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.
Kaki-kaki yang terdapat pada LCD
3. Arduino
|
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalahArduinoUnoyang menggunakan chip AVR ATmega 328P. Dalam memprogram.Arduino, kita bisa mengunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain. Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :Arduino Uno Bagian-bagian arduino uno:
Block Diagram Mikrokontroler ATMega 328P pada Arduino UNO Adapun block diagram mikrokontroler ATMega 328P dapat dilihat pada gambar berikut:
Block diagram dapat digunakan untuk memudahkan / memahami bagaimana kinerja dari mikrokontroler ATMega 328P. Pin-pin ATMega 328P:
Rangkaian Mikrokontroler ATMega 328P pada Arduino UNO
|
5. Motor Servo
 |
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Prinsip kerja motor servo:
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.

Gambar Pulse Wide Modulation / PWM
Lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
Prinsip kerja motor servo: Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini. Gambar Pulse Wide Modulation / PWM Lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya. |
//MASTER
#include <LiquidCrystal.h>
#include <Servo.h>
LiquidCrystal lcd(2, 3, 4, 5, 6,
7);
#define LM35 A1
#define buzzer 9
#define flamepin 13
#define fan 11
int threshold = 500;
int rainPin = 8;
int nilaiSuhu;
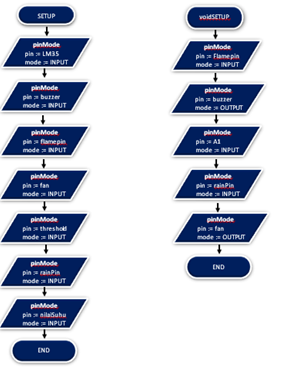
void setup(){
pinMode(flamepin, INPUT);
pinMode(buzzer, OUTPUT);
pinMode(A1, INPUT);
pinMode(rainPin, INPUT);
pinMode (fan, OUTPUT);
Serial.begin(9600); //Set baud rate 9600
lcd.begin(16, 2);
}
void loop()
{
nilaiSuhu = ( analogRead(LM35)
*0.343);
Serial.println(nilaiSuhu);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Kondisi
suhu");
lcd.setCursor(0, 1);
lcd.print(nilaiSuhu);
delay(50);
if(nilaiSuhu >= 35){
digitalWrite(fan, HIGH);
}
else{
digitalWrite(fan, LOW);
}
int rainValue = digitalRead(rainPin);
if (rainValue == 1){
Serial.println("1");
}
bool flameValue = digitalRead(flamepin);
if (flameValue == HIGH)
{
digitalWrite(buzzer,HIGH);
}
else
{
digitalWrite(buzzer,LOW);
}
if (rainValue==0){
Serial.print ("2");
}
delay (500);
}
//SLAVE
#include <Servo.h>
Servo myservo;
void setup() //Semua kode dalam
fungsi ini dieksekusi sekali
{
myservo.attach(9);
Serial.begin(9600); //Set baud
rate 9600
}
void loop() //Semua program dalam
fungsi ini dieksekusi berulang
{
if(Serial.available()>0)
{
int data = Serial.read();
if(data=='1') //Jika data yang dikirimkan berlogika
{
myservo.write(90);
Serial.print ("Putar 90");
delay(1000);
}
else if(data=='2') //Jika data yang dikirimkan berlogika
{
myservo.write(0);
Serial.print ("Putar 0");
delay(1000);
}
}
}



2. Gambar rangkaian simulasi

- html klik disini
- video klik disini
- program slave klik disini
- program master klik disini
- simulasi rangkaian klik disini
- data sheet ground klik disini
- data sheet motor klik disini
- data sheet led klik disini
- Datasheet Motor DC Download File
- Datasheet LCD Download File
- Datasheet LM 35 Download File
- Datasheet Potensiometer Download File
- Datasheet Arduino UNO download file
- datasheet sensor rain klik disini
- datasheet lm35 klik disini
- librari sensor rain klik disini
- library sensor flame klik disini